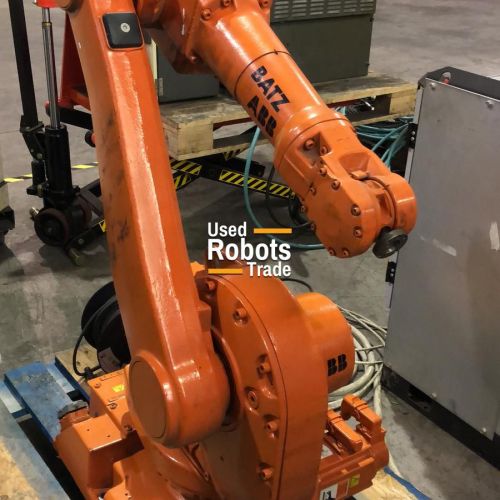
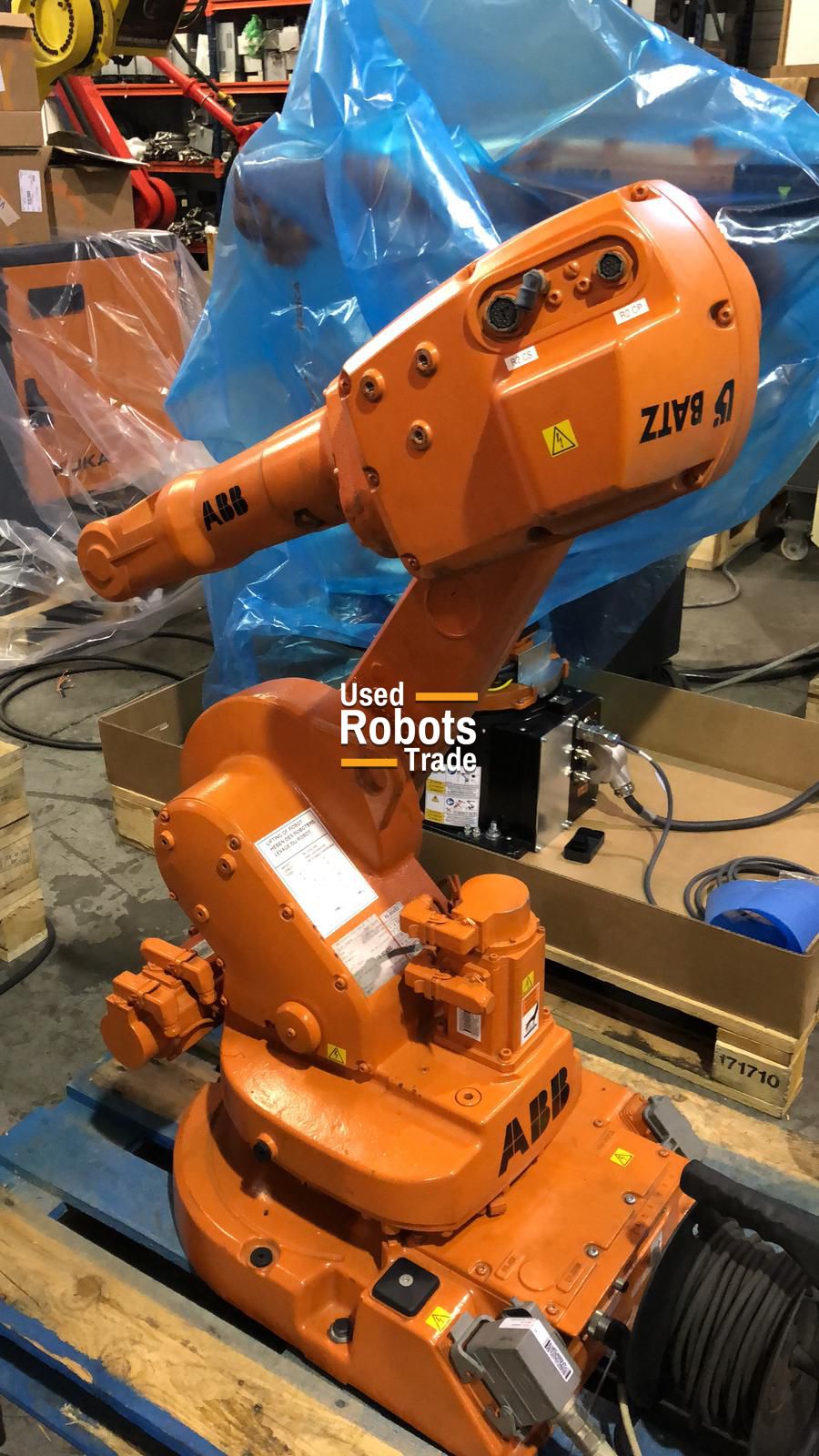
ABB 1600 M2004
Détails du robot
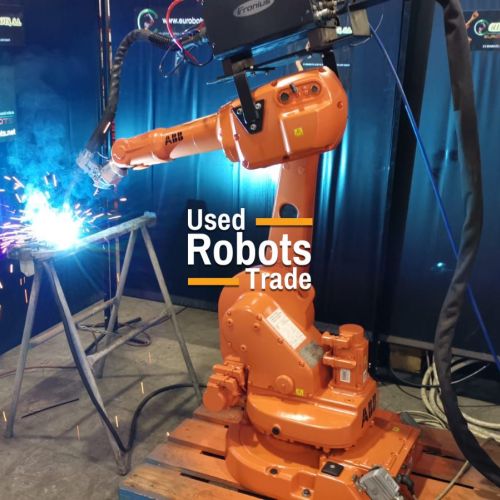
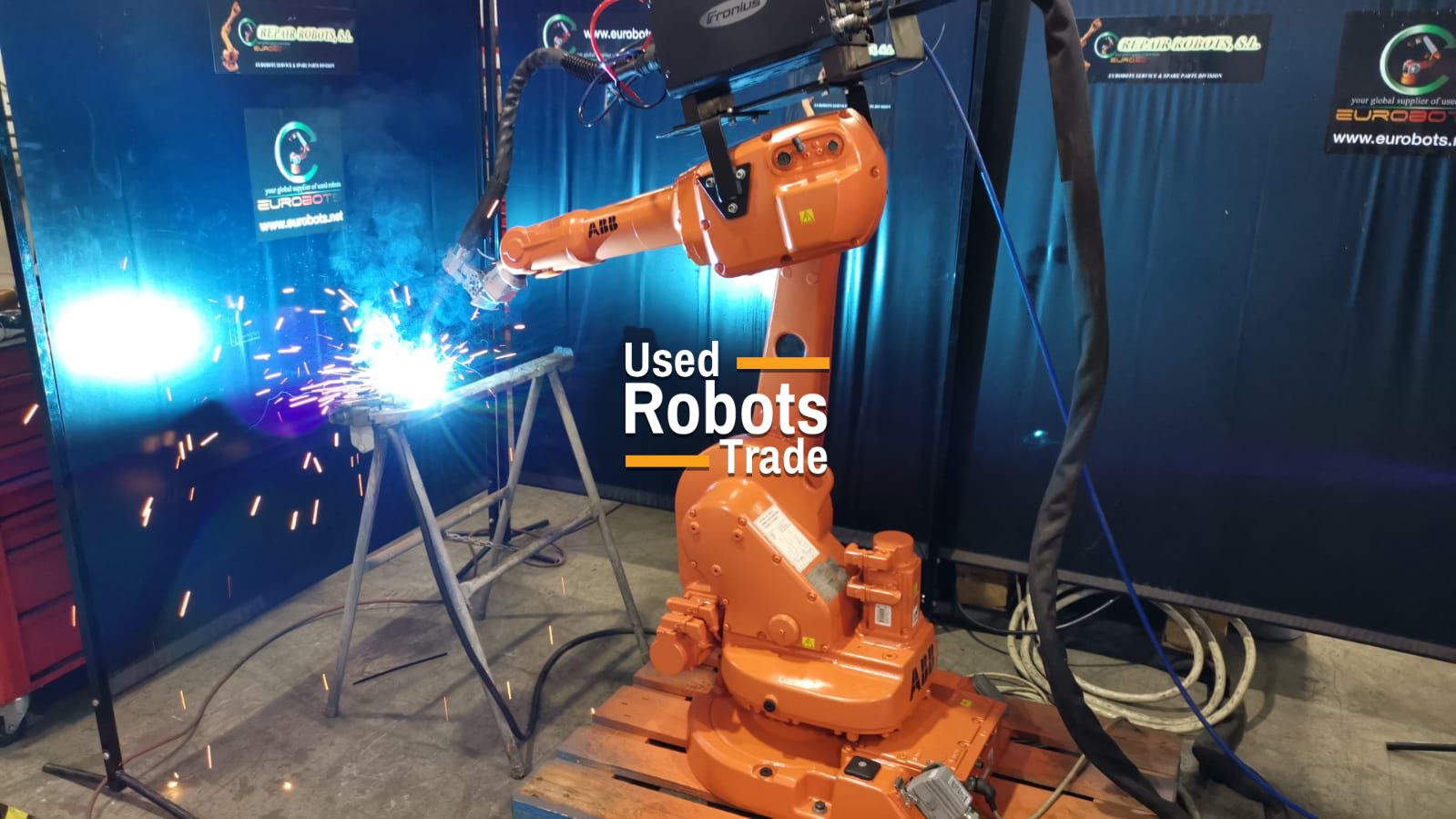
Ce robot industriel est excellent pour un certain nombre de tâches telles que la manutention de matériaux, le service de machines, la découpe, l'assemblage de pièces, le soudage, le moulage par injection, le moulage sous pression, l'emballage et la mesure. Il est à six axes et peut supporter un poids d'environ 6 kg et son bras peut atteindre 1450 mm.
Avantages du robot
Les temps de cycle des robots IRB 1600 sont inférieurs de plus de 50% à ceux des autres robots utilisés pour la manutention des matériaux, la maintenance des machines et d’autres applications. Il accélère et ralentit plus vite que la plupart des robots. Cela aide l'utilisateur à gagner du temps lorsqu'il travaille sur des tâches nécessitant des mouvements. Il est rendu possible grâce au contrôle breveté QuickMove d'ABB et au puissant moteur du robot. Ce robot a un faible frottement dans ses engrenages droits. Le taux de consommation est également réduit à une vitesse maximale de 0,58 kW. Le bruit produit est faible et sain pour les environs et à un niveau inférieur à 70 dB (A).
Le robot IRB 1600 est fabriqué avec le contrôleur IRCS M2004 et est doté des fonctionnalités suivantes.
FlexPendant
Ce FlexPendant est livré avec un écran coloré, propre et doté d'un joystick 3D permettant une interaction facile.
Programmation RAPIDE
La programmation rapide permet une excellente combinaison de résistance, de simplicité et de flexibilité. Il peut être utilisé avec divers programmes structurés et langage de base. Il prend en charge de nombreuses applications de processus et fonctionnalités innovantes.
Communication et contrôle de mouvement
Le système de contrôle de ce robot prend en charge les E / S et peut fonctionner avec n'importe quel réseau. Il dispose de fonctionnalités réseau puissantes telles que la messagerie socket et l'accès distant au disque.
Applications du robot
Caractéristiques principales
- Charge maximale du robot: 6 kg
- Portée maximale: 1450 mm
- Répétabilité: 0.02 mm
- Contrôleur: IRC5 M2004
Vitesse de déplacement du robot
- Axe 1: 180º/s
- Axe 2: 180º/s
- Axe 3: 185º/s
- Axe 4: 385º/s
- Axe 5: 400º/s
- Axe 6: 460º/s
Plage de travail de l'axe
- Axe 1: + 180º à -180º
- Axe 2: + 150º / s à -90º
- Axe 3: + 65º / s à -245º
- Axe 4: + 200º / s à -200º
- Axe 5: + 115º à -115º
- Axe 6: + 400º à -400º



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Deprecated: array_key_exists(): Using array_key_exists() on objects is deprecated. Use isset() or property_exists() instead in /home/mysmarty/public_html/__usedrobotstradefr/app/src/Eurobots/Model/AbstractModel.php on line 118
Deprecated: array_key_exists(): Using array_key_exists() on objects is deprecated. Use isset() or property_exists() instead in /home/mysmarty/public_html/__usedrobotstradefr/app/src/Eurobots/Model/AbstractModel.php on line 118
Deprecated: array_key_exists(): Using array_key_exists() on objects is deprecated. Use isset() or property_exists() instead in /home/mysmarty/public_html/__usedrobotstradefr/app/src/Eurobots/Model/AbstractModel.php on line 118
Deprecated: array_key_exists(): Using array_key_exists() on objects is deprecated. Use isset() or property_exists() instead in /home/mysmarty/public_html/__usedrobotstradefr/app/src/Eurobots/Model/AbstractModel.php on line 118
Deprecated: array_key_exists(): Using array_key_exists() on objects is deprecated. Use isset() or property_exists() instead in /home/mysmarty/public_html/__usedrobotstradefr/app/src/Eurobots/Model/AbstractModel.php on line 118